GL4000 Series
Product Discontinuation:
The GL3000 and GL4000 data logger series are still available until 30 June 2025.
Recommended alternatives: GL3400 and GL5000.
The GL3000 and GL4000 data logger series are still available until 30 June 2025.
Recommended alternatives: GL3400 and GL5000.
The GL4000 (CF card) und GL4200 (solid state harddisk) are the high-end data loggers in the G.i.N. product portfolio. Analogous to the GL3000 series, the GL4000 and GL4200 offer access to major automotive bus systems (CAN, LIN, MOST, K-Line und RS-232). In addition, the GL4000 series is also equipped with FlexRay and expanded memory.
With the help of the GL4000 series, a multitude of applications concerning vehicle development, validation, endurance tests, quality control and service on the end customer, can be realized. World-wide fleet tests are no problem with this range of functions; they can be easily installed and carried out.
With the help of the GL4000 series, a multitude of applications concerning vehicle development, validation, endurance tests, quality control and service on the end customer, can be realized. World-wide fleet tests are no problem with this range of functions; they can be easily installed and carried out.
Information Sheet
GL4000 series: All Key Details
at a Glance – Get Informed Now!
at a Glance – Get Informed Now!
AREAS OF APPLICATION
Offers a wide range of configuration options
Fast data readout ability
Location-independent and fast data access due to the mobile communication
High storage capacity with easily exchangeable SD card
Software support is included
Interfaces
Communication
Features
Logging Function
Classifier Function
Gateway Function
Further Functions
Interfaces
Communication
Features
– two user-programmable keys e.g. for a manual triggering and
– two LEDs for status indication
Logging Function
Classifier Function
– Minimum and maximum values of a variable
– Frequency of occurrence of a criterion
– Idle time and active time of a criterion
– Frequency of value change of a condition or of a signal
Gateway Function
Further Functions
IN-VEHICLE USAGE
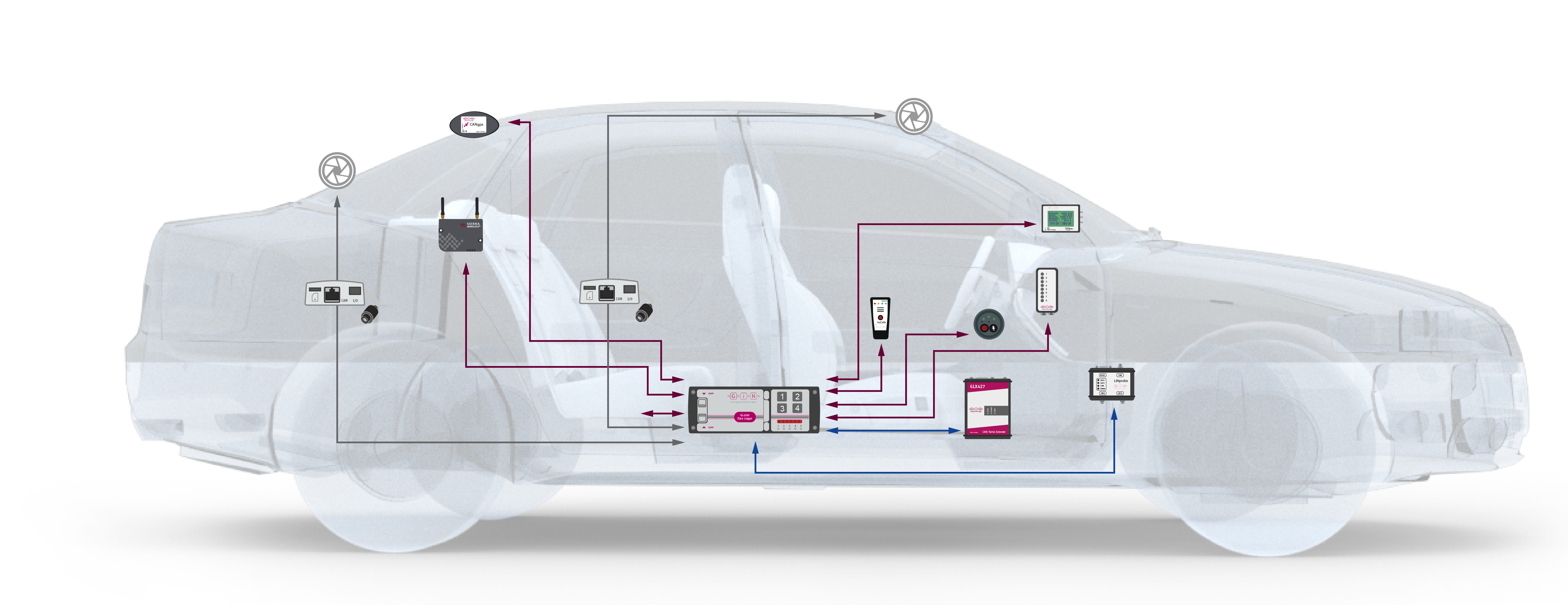
LINprobe
CAN-/ LIN-Gateway
CA8DL
Compact monitor for digital
display of states via 8 LEDs
VoCAN
Compact handset
for voice recording
and playback of speech
CASM2T3L
For triggering with sound output
and with a microphone for
voice recording
LOGview
LCD display with
16 independent and freely
programmable pages
GLX427
For 12 additional CAN interfaces
and up to 15 serial interfaces
HostCAM
Up to 2 cameras
HostCAM
Up to 2 cameras
LTE Router
Remote data transmission
CANgps
Determines and sends the
position data via CAN or
RS-232 to the data logger
CONNECTIVITY
LINprobe
2 x LIN to CAN converter
To product
HostCAM F44
With up to 4 sensor units for recording pictures and image sequences on data loggers
To Product
CANgps
GPS receiver on CAN
To Product
LTE Router
LTE router for mobile data transmission
To Product
LOGview
Freely configurable, controllable display with page switching and event triggering via push button
To Product
CA8DL
Compact monitor for displaying digital signals and conditions via 8 LEDs
To Product
CA4T4DL
Triggering events via 4 push buttons and calling up states via 4 LEDs
To Product
CAS1T3L
Compact handset for displaying conditions via 3 LEDs and for triggering events via 1 push-button with additional sound output
To Product
CASM2T3L
Compact handset for displaying conditions, triggering events and for voice recording as well as sound output
To Product
GLX427
For a further 12 CAN interfaces and
up to 15 serial interfaces
To Product
up to 15 serial interfaces
DOWNLOAD AREA
Please log in to have access to our download center
Kunden-Login
| Title | Size | Date added | Download |
|---|---|---|---|
| MLtools_MLcenter_Manual_E | 3.34 MB | 01-12-2025 | |
| GiNconf configuration program V. 1.5.0100 (64 Bit) | 427.23 MB | 05-12-2025 | |
| Visual LTL (V. 3.22.0.0) | 111.02 MB | 01-12-2025 | |
| LTL_programming_Manual_E | 3.91 MB | 01-12-2025 | |
| MLtools (V. 0.156.0.0) | 186.46 MB | 05-12-2025 | |
| LogGraph analysis program (V. 4.3) | 6.31 MB | 26-06-2024 | |
| GL3000_GL4000_Manual_E | 2.57 MB | 01-12-2025 | |
| LogGraph_Manual_E | 1.79 MB | 01-12-2025 | |
| VisualLTL_Manual_E | 7.41 MB | 01-12-2025 | |
| GiNconf_Manual_E | 2.77 MB | 01-12-2025 | |
| GLWebDisplay-GLWebserver_Manual_E | 1.03 MB | 11-01-2022 | |
| GL3000_GL4000_Supplier Inquiry device | 5.22 MB | 11-01-2022 | |
| GL3000_GL4000_Supplier Inquiry VARTA | 271.89 KB | 11-01-2022 |